Da sempre, nel campo della robotica, la mano umana è considerata il vertice della destrezza, un capolavoro di ingegneria biologica da imitare. Ma cosa succederebbe se, anziché limitarci a replicare la natura, provassimo a superarla? Questa è la domanda che si sono posti i ricercatori dell’École Polytechnique Fédérale de Lausanne (EPFL), in Svizzera. La loro risposta, pubblicata sulla prestigiosa rivista Nature Communications, ha la forma di una mano robotica che non solo ridefinisce il concetto di presa, ma introduce un paradigma completamente nuovo: la “loco-manipolazione”, ovvero la capacità di combinare la manipolazione stazionaria con una mobilità autonoma. Il risultato è un dispositivo che può staccarsi dal suo braccio, camminare come un ragno e recuperare oggetti fuori portata, per poi ricollegarsi.
Un Design Oltre l’Antropomorfismo
Il punto di partenza del team di ricerca, guidato da Xiao Gao e Aude Billard del Learning Algorithms and Systems Laboratory, è stata una critica costruttiva al modello umano. La nostra mano, con la sua struttura asimmetrica e un unico pollice opponibile, è straordinariamente versatile, ma presenta limiti evidenti quando deve operare in spazi ristretti o afferrare oggetti da angolazioni complesse. Chi non ha mai contorto il polso in modo innaturale per recuperare qualcosa da dietro uno scaffale?
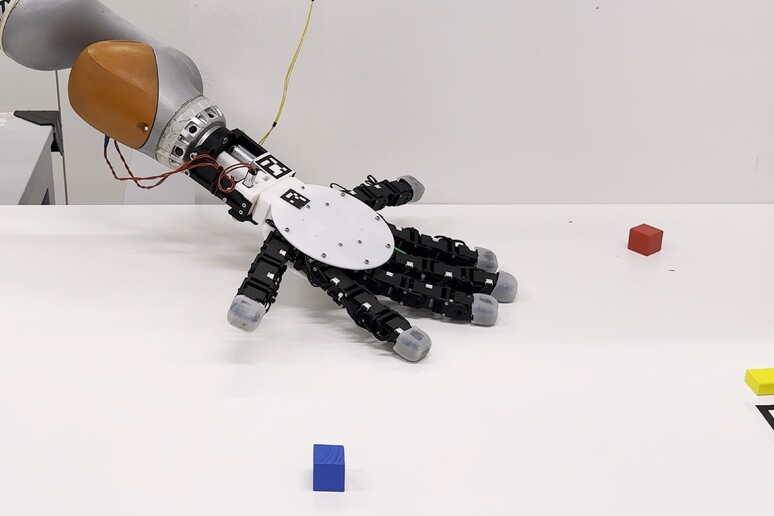
Per aggirare questi ostacoli, i ricercatori dell’EPFL hanno abbandonato il dogma antropomorfico. Hanno progettato una mano con un’architettura simmetrica e modulare, che può ospitare fino a sei dita identiche con punta in silicone per migliorare la presa. In questa configurazione, non esiste un pollice fisso; qualsiasi coppia di dita può essere configurata per agire in opposizione, creando una presa a pinza versatile e potente. Inoltre, il concetto di “palmo” e “dorso” viene superato: la mano è completamente reversibile, capace di afferrare oggetti da entrambi i lati.
La Mano che Cammina: Meccanica di una Rivoluzione
La caratteristica più sbalorditiva di questo prototipo è la sua capacità di sganciarsi dal braccio robotico e muoversi in autonomia. Questa abilità, che ricorda la celebre “Mano” della Famiglia Addams, è tutt’altro che un vezzo fantascientifico. Una volta staccata, la mano utilizza le sue dita come zampe per “camminare” su superfici, superare ostacoli e intrufolarsi in spazi inaccessibili per un braccio robotico tradizionale.
Il team ha utilizzato algoritmi genetici per ottimizzare il design in un ambiente simulato, determinando che la configurazione ottimale a cinque dita prevede tre dita per la locomozione e due per la presa durante il movimento. Questo le permette di eseguire compiti complessi, come recuperare fino a tre oggetti in sequenza e trasportarli contemporaneamente, mantenendo una presa solida. Il dispositivo può sostenere un carico fino a due chilogrammi ed è in grado di replicare ben 33 diversi tipi di presa tipici dell’arto umano.
L’ispirazione, come spiegato dai ricercatori, viene anche dal mondo naturale, dove organismi come il polpo usano i loro arti sia per la locomozione che per la manipolazione. Questa fusione di funzioni apre scenari applicativi impensabili fino ad oggi.
Applicazioni Future: dal Soccorso all’Industria 4.0
Le potenziali applicazioni di questa tecnologia sono tanto vaste quanto rivoluzionarie. Vediamone alcune:
- Operazioni di soccorso: In caso di catastrofi, come terremoti o crolli, questa mano potrebbe strisciare tra le macerie per raggiungere luoghi inaccessibili, trasportare piccoli kit di primo soccorso o fornire un feedback visivo ai soccorritori.
- Ispezione industriale: La capacità di muoversi all’interno di tubazioni, motori complessi o reattori permetterebbe ispezioni e manutenzioni più sicure ed efficienti, riducendo i rischi per gli operatori umani.
- Logistica e magazzini: In ambienti automatizzati, potrebbe ottimizzare lo spazio recuperando oggetti da scaffalature molto fitte, dove un braccio robotico convenzionale non avrebbe margine di manovra.
- Robotica di servizio e domestica: Potrebbe assistere persone con mobilità ridotta, recuperando oggetti caduti sotto i mobili o in posizioni difficili da raggiungere.
Il team ha già sviluppato una versione del prototipo in grado di operare in modo completamente autonomo, aprendo la strada a un futuro in cui i robot potranno svolgere compiti in modo indipendente e superare le limitazioni fisiche umane.
Un Nuovo Orizzonte per la Robotica
Il progetto dell’EPFL non è solo un incredibile pezzo di ingegneria, ma rappresenta un cambio di prospettiva fondamentale. Segna il passaggio da una robotica che si limita a imitare l’uomo a una che ne trae ispirazione per creare soluzioni ottimizzate per compiti specifici, superandone i limiti evolutivi. L’obiettivo non è più replicare le nostre funzioni, ma estenderle. Questa “loco-manipolazione” affidabile e fluida ha il potenziale per diventare una tecnologia chiave per la robotica industriale, di servizio ed esplorativa del prossimo decennio.